Track robots are the coolest! They are also a kind of pain in the butt. Tracks keep falling off, the cheap ones get squalling gears that need a lot of grease. But they are worth it! There is nothing more fun than watching these tracked bases grind their way over obstacles...
So I had to build a track robot!
I started with the Tamiya Base unit - A little motor with switchable batteries that goes forward and backward. This was back when I was buying a collection of little simple bots to see how well they got around. It wasn't long until I wanted some smarts to the motion and I bought a microrobot wall follower. It had an IR detector so it didn't have to bang into things, and could zoom along, but only forward and it could only turn in one direction. But it could follow walls.
So I added the dual drive Tamiya for 10 bucks. Now I had a spare gear drive... I kludged on the IR detector from the microrobot and voila! Now my track drive got a life of it's own... I would call it TrakBot!
This was good! This was fun... But now I had seen the famous Parallax Stamp powered bots and they would run up to something and stop, make a decision or two, then move on. This called for brains!!!!
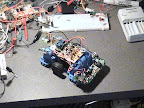
I ordered a picAxe m8, m14, and 18x... Hmmm... The 18 x running the TrakBot??? Seemed like a good idea. Here are the first test results...
Oh Boy! This was too fun! By now, a zillion other experiments had introduced me to the Sharp Distance Measuring Devices. One of these babies and the TrakBot could be pretty darn smart when it came to avoiding obstacles. Oh yeh, and there's the little matter of doing it all with an m8 picAxe and Motor driver. You can get all this on a pre-soldered board for less than $20 USD, so it's only logical. The results:
This is my funnest robot. I've got about $50 USD in it, but it has a lot of "think" power, and, it's a lot of fun. Here's the scoop on this bot in video form
1.27.2008
1.25.2008
BEAM Bot Inspired Fun Quick DumBot!
I strapped a couple of batteries on a gearbox with motor and voila! I had a BEAM bot!
This thing is dumb, it's wheels are square stiff wire, but it's really fun and a favorite around the robot lab. This is disgusting, because now I've got every imaginable robot around here, but by far the favorite is this dumbot!
So I've obtained another Tamiya Twin Motor Gearbox and I'm thinking about a BEAM bot with a little more smart than a nervous net :-) We'll see...
This thing is dumb, it's wheels are square stiff wire, but it's really fun and a favorite around the robot lab. This is disgusting, because now I've got every imaginable robot around here, but by far the favorite is this dumbot!
So I've obtained another Tamiya Twin Motor Gearbox and I'm thinking about a BEAM bot with a little more smart than a nervous net :-) We'll see...
HexBug Busted Open
A crazy little bot called HexBug...
When it goes, it goes like this... Forward motion until the feeler touches something which reverses the motor. When it backs up, the motor has a clutch that causes one leg to not move in reverse. The net effect is when the bug backs up, it turns, thus a simple object avoidance algorithm runs without a control computer to make it happen. I almost forgot, there is a clapper in the HexBug. Yeah, just clap and it reverses, whether it hits something or not. I forgot to show that in the video.
But of course, I'm thinking of adding a picAxe or equivalent microcontroller!
When it goes, it goes like this... Forward motion until the feeler touches something which reverses the motor. When it backs up, the motor has a clutch that causes one leg to not move in reverse. The net effect is when the bug backs up, it turns, thus a simple object avoidance algorithm runs without a control computer to make it happen. I almost forgot, there is a clapper in the HexBug. Yeah, just clap and it reverses, whether it hits something or not. I forgot to show that in the video.
But of course, I'm thinking of adding a picAxe or equivalent microcontroller!
Avoider Robot PLUS mods
The avoider robot is a cute little wall-following, object avoidance robot around $35 USD retail. Well, cute is about it. With a wonderful set of IR "whiskers" the thing as it comes from the factory moves only forward.
How the Avoider uses IR.
Like I said, it is setup to run both motors from its supply voltage (four AA's inside the case.) When it sees an obstacle, one of the motors is shut off by the IR detectors. I can't remember which direction it turned when it came "out of the box", but it is easy enough to swap the motor connections so it turns the other direction.

Figure 1. The Avoider Microrobot is a cute little guy.
At the time I was learning about Motor Controllers, so I decided to grab a handful of 2N3904's and 6's and made my own motor control. Now I could tell the little bot to go forward and backwards, just by setting the right pins high.
Next enhancement had to do with adding a chip to control it all. I first tinkered with NE-555's and other chips, but in my heart I knew I wanted to use a Microprocessor, so I looked around and decided to spring for the PIC chips with built-in BASIC interpreter - picAxe was the choice. I liked the 8 pin package and that gave me plenty of outputs and one input pin to drive an interrupt. The result? It looks pretty ugly, but it's one of the more reliable "bots" sitting around here.
How the Avoider uses IR.
Like I said, it is setup to run both motors from its supply voltage (four AA's inside the case.) When it sees an obstacle, one of the motors is shut off by the IR detectors. I can't remember which direction it turned when it came "out of the box", but it is easy enough to swap the motor connections so it turns the other direction.
Figure 1. The Avoider Microrobot is a cute little guy.
At the time I was learning about Motor Controllers, so I decided to grab a handful of 2N3904's and 6's and made my own motor control. Now I could tell the little bot to go forward and backwards, just by setting the right pins high.
Next enhancement had to do with adding a chip to control it all. I first tinkered with NE-555's and other chips, but in my heart I knew I wanted to use a Microprocessor, so I looked around and decided to spring for the PIC chips with built-in BASIC interpreter - picAxe was the choice. I liked the 8 pin package and that gave me plenty of outputs and one input pin to drive an interrupt. The result? It looks pretty ugly, but it's one of the more reliable "bots" sitting around here.
Scribbler vs TrakBot
I got a Scribbler robot for around $80 USD at Fry's
I took it home, put it down on the lab floor and let it run the same kind of course I let all my robots run around in... My Lab, and the Outside Deck.
The scribbler was an "out of the box" disappointment because:
1. It's range finders are set too high to work well in my Lab/Office, it worked OK, out on the deck.
2. It backs up and seems to get stuck backing up. (Unless you are outside. It needs several feet of freedom.)
BUT!!!! The scribbler is programmable! So after hacking the demo code, I found if you shift the frequency of the Infrared Generators, I could cut the sensitivity. After playing around with the time of running, how long it backs up, and stuff like that, I got it to run pretty well.
Out of the box, the Scribbler is a lot less fun than the TrakBot, but I'll let you judge for yourself.
Figure 1. The Scribbler Robot "Out of the Box" experience
Compared to the Scribbler, TrakBot found it's way around nicely. Because it uses the Sharp IR send/reciever pair, it works better in sunlight, or bright room lights. And, best of all, TrakBot sees most black objects as well as any IR combo I've played around with.
The Scoring Points: (In no particular order)
Fun Factor - Does it get around the area and find it's way around obstacles?
Stuckness - Does the bot get stuck easily (higher number means worse score)
Smartness - Can it get out of jams easily
Potential - What can you add to the bot?
Jam Factor - Another term for Stuckness.
Autonomy - Degree of human interference required to run a course
I took it home, put it down on the lab floor and let it run the same kind of course I let all my robots run around in... My Lab, and the Outside Deck.
The scribbler was an "out of the box" disappointment because:
1. It's range finders are set too high to work well in my Lab/Office, it worked OK, out on the deck.
2. It backs up and seems to get stuck backing up. (Unless you are outside. It needs several feet of freedom.)
BUT!!!! The scribbler is programmable! So after hacking the demo code, I found if you shift the frequency of the Infrared Generators, I could cut the sensitivity. After playing around with the time of running, how long it backs up, and stuff like that, I got it to run pretty well.
Out of the box, the Scribbler is a lot less fun than the TrakBot, but I'll let you judge for yourself.
Figure 1. The Scribbler Robot "Out of the Box" experience
Compared to the Scribbler, TrakBot found it's way around nicely. Because it uses the Sharp IR send/reciever pair, it works better in sunlight, or bright room lights. And, best of all, TrakBot sees most black objects as well as any IR combo I've played around with.
The Scoring Points: (In no particular order)
Fun Factor - Does it get around the area and find it's way around obstacles?
Stuckness - Does the bot get stuck easily (higher number means worse score)
Smartness - Can it get out of jams easily
Potential - What can you add to the bot?
Jam Factor - Another term for Stuckness.
Autonomy - Degree of human interference required to run a course
DogBot the RoboDog
Inspired by this robot...
Figure 1. The target Robot. This is a pretty cool home guard dog...
I created this...
I got a cheap R/C model for a body... Did I mention the goal was to build a companion and/or a guard dog that wanders the house, and sleeps a lot? Hey, I wanted a dog... So the first stage was to get the dog to be autonomous.
Figure 2. Dog Bot Starts to come alive on the work bench.
DogBot operates with several different motivations:
1. Starts in sniff and explore mode where DogBot "drags" itself around by scanning sensors and moving toward the largest object...
2. It will revisit the largest object and move toward it, until the object is too close, DogBot moves back twice as far as before. If a rescan shows no objects are close, DogBot goes into wander mode where it moves toward the open space.
3. DogBot will also wall follow, avoiding major objects, just running around looking at/for things to sniff around.
4. DogBot goes to the light or noise as an overall strategy...
Figure 3. This is the first stage "finished" model dog DOGBOT !
In DogBot's first incarnation, it was powered by a picAxe m14 chip. I had a lot of trouble with this thing, but eventually got it to do a few things, but I wanted more, so I kept upgrading...
This is the picAxe 18x model... I'm testing the motor drive here, it's simple but always hopeful for the budding roboticist...
And then things improved... First step.. Get it to "sniff around", next step, get it to find an open spot while avoiding crashing into things... The tests:
Now DogBot would look around, find an open spot and take off... While running around though, he would be looking to see if he was going to crash into something...
Getting through the door was a problem because DogBot would find the opening, but when he started through, his over sensitive IR detectors would make him run away from the door opening... Like this:
But eventually, DogBot became a free-ranging hound. There are things about DogBot I don't like, the least of which is the batteries don't hold up because the motor is a cheapy that sucks current like crazy (it did when it was a radio controlled car too.)
So someday, I want to take DogBot's head and transplant it to another platform. One that can go for walks with me... I'm not there yet, but DogBot did pass the door test and he does have interesting behaviors that are fun to watch and deal with...
The completed roboDog, DogBot, passes the robot household test in this YouTube Video:
Subscribe to:
Posts (Atom)